
Ngón tay cảm ứng - Góp phần làm robot giống người
| 03/07/2012 12:00 PM


Thực ra, hiện nay các loại cảm biến xúc giác hay các loại da nhân tạo bằng sợi nano không còn xa lạ với giới khoa học. Tuy nhiên, những gì Viện kỹ thuật Viterbi của trường Đại học California làm được mới thật sự ấn tượng.
Những bộ phim như Terminator, I Robot, Wall.E hay những tác phẩm truyện tranh như Doraemon đã cho chúng ta cái nhìn về một tương lai hiện đại. Trong thế giới tương lai đó, các loại robot đã phát triển đạt đến trình độ có thể giao tiếp với con người hay cảm nhận được môi trường xung quanh qua các giác quan nhân tạo. Với sự kiện ghi tên con robot iCub vào danh sách những vận động viên rước đuốc Olympic 2012 tại London vào mùa hè tới, chúng ta dường như đã tiến sát hơn chút nữa đến thế giới viễn tưởng.
Chúng ta trông chờ các loại robot hoàn chỉnh trong tương lai.
Robot iCub mặc dù có khả năng thị giác và thính giác khá tốt, thậm chí có thể nghe và lặp lại những âm tiết mà người đối diện đang nói với nó, nhưng một đặc điểm chưa hoàn thiện của loại robot này là chưa có khả năng xúc giác. Một loại ngón tay công nghệ dành cho robot vừa được phát minh có thể giúp iCub nói riêng và các loại robot nói chung tiến gần hơn đến sự hoàn thiện.
Thực ra, hiện nay các loại cảm biến xúc giác hay các loại da nhân tạo bằng sợi nano không còn xa lạ với giới khoa học. Tuy nhiên, những gì Viện kỹ thuật Viterbi của trường Đại học California làm được mới thật sự ấn tượng. Những nhà nghiên cứu tại đây đã tạo ra những ngón tay nhân tạo mô phỏng lại khả năng cảm nhận của con người, thậm chí, ở một góc độ nào đó, nó đã vượt quá khả năng mà những ngón tay người có thể làm được. Những ngón tay này có thể cảm nhận và phân biệt được rất nhiều các loại vật liệu khác nhau khi chạm vào chúng.

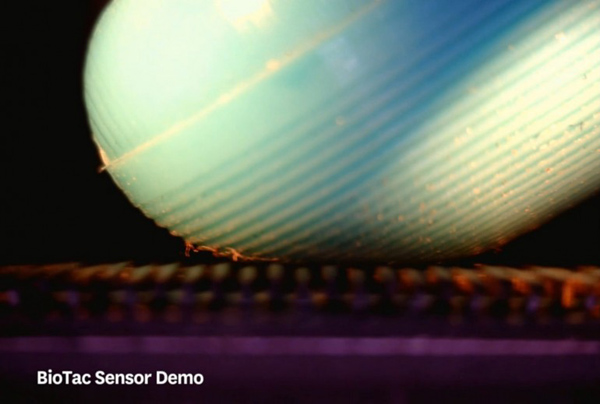
Ngón tay robot với các đường vân tay giả và lõi xương cảm biến.
Ngón tay robot này có một tấm da nhân tạo mềm, linh hoạt ở ngoài, bên trong chứa đầy chất lỏng và các loại cảm biến. Phần da nhân tạo bên ngoài của ngón tay được làm với các dấu vân tay giả để hệ thống cảm ứng có thể cảm nhận được cả động rung khi miết trên bề mặt vật liệu. Mỗi bề mặt vật liệu lại có độ rung khác nhau khi tay chúng ta miết lên bề mặt ấy. Một micro hoạt động trong chất lỏng được đặt trong lõi của ngón tay robot này, nó ghi nhận sự rung động của bề mặt vật liệu ấy và phân tích xem đó là loại vật liệu gì. Chiếc lõi này cũng như một chiếc xương, giữ cho ngón tay ổn định. Ngoài khả năng cảm nhận, phân biệt các loại vật liệu, ngón tay robot còn có thể cảm nhận nhiệt độ của bề mặt, lực và hướng của lực tác dụng lên nó.

Ngón tay cảm biến cho robot trong quá trình hoạt động.
Các nhà phát minh cũng đã viết nên những thuật toán để điều khiển robot phản ứng lại với những gì đã được cảm nhận qua các ngón tay nhân tạo này. Sau khi chạm vào bề mặt, robot sẽ được lập trình để làm việc với vật liệu ấy. Đối với những loại robot của tương lai, những hành động này có thể là mang vác, vận chuyển đồ vật đến một địa chỉ nào đó. Thậm chí chúng sẽ có thể phản ứng với những gì vừa chạm vào theo cách chúng ta làm, như biểu lộ cảm xúc yêu, thích đối với những thứ vừa chạm vào.
Giáo sư Kỹ thuật khoa học y sinh Gerald Loeb cùng với tiến sỹ vừa tốt nghiệp Jeremy Fishel đã sử dụng thuật toán Thăm dò Bayesian đối với các loại ngón tay máy này để xác định vật liệu. Sau khi tiếp túc với những gì chạm vào, những ngón tay sẽ qua một vài bước thăm dò, chúng sẽ chỉ ra được vật liệu đó là vật liệu gì. Các cuộc thử nghiệm đã cho thấy khả năng thành công lên đến 95%. Những cuộc thử nghiệm khi robot xác định sai cũng do những vật liệu này quá giống nhau, những ngón tay robot không thể phân biệt được chúng. Tuy nhiên, những ngón tay này lại phân biệt các loại vải, len một cách dễ dàng, mặc dù cho đến thời điểm này chúng chưa đủ thông minh để xem con người sẽ thích loại len, vải này hơn. Chúng ta sẽ chờ tương lai đem đến những loại cảm ứng hoàn chỉnh cho robot.
Dự án chế tạo các loại cảm ứng xúc giác được bắt đầu từ năm 2008 tại SynTouch LLC, một phần của Chương trình phát triển các thiết bị ích lợi trong y học của USC. Hiện nay họ đã đưa lên thị trường các loại thiết bị cảm ứng sinh học, những ngón tay robot của Loeb và Fishel là một trong những dự án đang được phát triển của họ.
Tham khảo: GizMag