
GroundBot, robot do thám linh hoạt với khả năng quan sát 360 độ
| 20/06/2012 04:42 PM


Hãng Rotundus của Thụy Điển vừa qua đã giới thiệu mẫu robot mới của mình, "quả bóng" GroundBot. Một robot do thám khá linh hoạt, có thể lăn qua bùn, cát, tuyết, thậm chí nổi trên nước.
Các robot do thám điều khiển từ xa ngày càng được phát triển nhằm phục vụ cho các mục đích quân sự, như trinh sát chiến trường, dò mìn hoặc tuần tra v..v.. Hãng Rotundus của Thụy Điển vừa qua đã giới thiệu mẫu robot mới của mình, "quả bóng" GroundBot. Một robot di chuyển khá linh hoạt, có thể lăn qua bùn, cát, tuyết, thậm chí nổi trên nước và khả năng quan sát 360 độ nhờ 2 camera 2 bên.

Thiết kế bên ngoài
"Một thiết kế vô cùng đơn giản, thân thiện và dễ điều khiển" đó là những gì hãng sản xuất đã nói. GroundBot được trang bị những công nghệ tiên tiến nhất bên trong một "quả bóng" đơn giản. "Quả bóng" này có chiều cao 0.6 m, chiều ngang 0.8 m và nặng 25 kg.
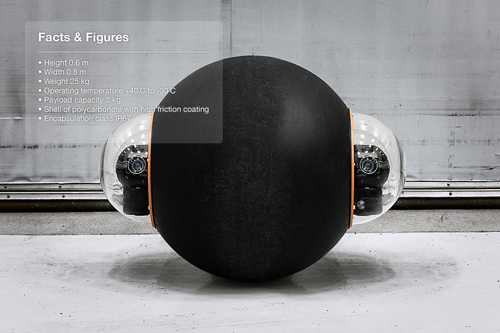
2 camera được đặt trong lớp kính bảo vệ và gắn 2 bên giống như cặp mắt của loài thằn lằn. Với góc quan sát rất rộng, khi gộp hình ảnh thu được từ các camera chúng ta sẽ có hình ảnh toàn cảnh xung quanh GroundBot. Lớp kính bảo vệ có khả năng chịu nhiệt và lực va chạm rất lớn, đồng thời ngăn không cho các linh kiện điện tiếp xúc với môi trường bên ngoài, do đó GroundBot rất thích hợp để điều tra các vụ rò rỉ khí gas.

Bề mặt của GroundBot được phủ một lớp polycarbonate và được hàn kín hoàn toàn, nhằm tránh cát bụi hay nước xâm nhập vào các thiết bị bên trong. Trên bề mặt GroundBot còn có nhiều gai nhỏ giúp nó bám đường, tăng lực ma sát sẽ giúp tăng khả năng truyền chuyển động, không những thế các gai nhỏ này còn giúp nó vượt qua nhiều loại địa hình khác nhau.
Cấu tạo
Trái ngược với bề ngoài "giản dị", cấu tạo bên trong của GroundBot được trang bị nhiều cảm biến tiên tiến nhất. Từ cảm biến phóng xạ, độ ẩm, khí gas, lửa, hơi nóng, khói, vật liệu sinh học, vật liệu nổ, chất ma túy v..v.. đến các cảm biến tốc độ, gia tốc, GPS. Ngoài ra còn có cả microphone và loa ngoài, sử dụng trong các trường hợp do thám hay đàm phán với những tên cướp vũ trang. Các camera có khả năng quay nhiều góc, zoom xa, kèm theo ống kính hồng ngoại giúp quan sát trong đêm
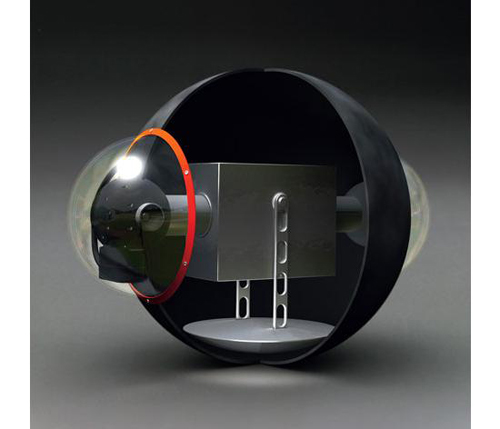

GroundBot có một roto quay bên trong giúp nó chuyển động. Khi chuyển động roto sẽ làm quay toàn bộ phần thân của GroundBot, khiến nó lăn đi giống như một quả bóng. Nguồn năng lượng được cung cấp từ bộ Pin Li-Ion, giúp GroundBot có thể hoạt động liên tục trong 16 giờ và sạc lại trong 3 giờ.
Hoạt động
GroundBot có khả năng di chuyển linh hoạt, một phần do thiết kế đơn giản hình cầu, một phần do cách thức di chuyển đặc biệt của nó. Bên trong GroundBot có một hệ thống roto được gắn vào một con lắc, khi roto quay sẽ làm con lắc quay và thay đổi trọng tâm của GroundBot khiến nó di chuyển. Một cơ chế điều khiển khác có thể làm con lắc lệch sang trái hoặc sang phải, khiến GroundBot chuyển hướng.
GroundBot chạy thử tại sân bay.
GroundBot có thể tiến, lùi mà không cần quay đầu. Tăng giảm tốc độ một cách nhanh chóng và linh hoạt. Và đặc biệt GroundBot hoạt động rất êm, hầu như không gây ra bất kỳ tiếng động nào, một phần nhờ cơ chế hoạt động và lớp vỏ polycarbonate bọc bên ngoài.

GroundBot còn có thể vượt qua các địa hình như bùn lầy, tuyết và nổi trên nước. Đó là nhờ thiết kế đơn giản giúp trọng lượng của nó rất nhẹ so với các robot thông thường, GroundBot chỉ nặng có 25 kg do đó nó dễ dàng lăn qua các vũng bùn lầy và nổi trên mặt nước. Bên cạnh đó là đường kính khá lớn của "quả bóng", gần bằng một lốp xe ô tô giúp nó dễ dàng vượt qua các chướng ngại vật.

Điều khiển
GroundBot có thể điều khiển trực tiếp từ xa thông qua tín hiệu Wi-fi. Việc điều khiển cũng không quá phức tạp, giống như nhà sản xuất đã nói : "nó giống như một game mô phỏng đua xe thường thấy". Các hình ảnh truyền về được xử lý và có thể hiện dưới dạng 2D hoặc 3D.

Bên cạnh đó GroundBot có thể được điều khiển thông qua hệ thống GPS. Người điều khiển sẽ dựa trên bản đồ số hóa và vạch ra đường đi định sẵn cho GroundBot. Người điều khiển cũng có thể thiết lập sẵn các tùy biến cho camera như độ nghiêng, zoom cho từng lộ trình vạch sẵn.

Giao diện điều khiển của GroundBot cũng khá đơn giản, chỉ hiển thi bản đồ số và vạch pin. Trong khi các cảm biến và nhiều tùy chỉnh khác được ẩn đi và chỉ hiện ra khi được kích hoạt. Điều này giúp người điều khiển không bị rối bởi quá nhiều thông tin, đồng thời tập trung vào các hình ảnh thu được.

Ngoài ra GroundBot cũng có một vài chế độ tự động, như đi tuần tra trong một khu vực nhất định và cảnh báo khi có bất kì chuyển động nào. Chế độ này rất thích hợp với việc tuần tra trong các nhà giam hoặc làm chốt trinh sát trên chiến trường.
Tương lai
Hiện nay GroundBot đang được thử nghiệm trong các hoạt động an ninh dân sự như tuần tra các khu vực sân bay, nhà máy, các viện bảo tàng. Nhưng trong tương lai GroundBot sẽ la cánh tay phải đắc lực trên chiến trường với khả năng di chuyển vô cùng linh hoạt, gần như không gây tiếng động và khả năng quan sát rất rộng. GroundBot cũng sẽ trợ giúp rất nhiều trong các trường hợp do thám phóng xạ, khí độc hoặc dò bom mìn hay tìm kiếm những người bị nạn còn sống sót. Những ứng dụng của GroundBot quả thực là rất rộng lớn, và nó sẽ mở ra một tương lai mới trong lĩnh vực nghiên cứu và chế tạo robot.
Tham khảo: Gizmag